Amazonでなんか面白いもの売ってないかなと思って彷徨っていたらこれを見つけた。

wiki.sipeed.com
えーっとこれが600円?

中身。
KIOXIAの32GB microSDだけで元値超えてるんじゃない?
Linuxの走るM2スタイルのCPUボードに64MB DDR2メモリ、2Mピクセルのカメラ、SDカードスロット、1.3インチIPSモニタ、USB-OTG、無線LAN、3軸ジャイロ、マイク、スピーカーまでついている。
とりあえずそのままUSBをMacと繋いでみたが、何も起こらない。一応USBーシリアルの変換の応答はある。SDカードにOS入っているのかな?ということで挿入し、改めてUSB接続。
キタキタ。
��3���� -'�-�m�����)��Ӵ��)R��+��------run rc.preboot file-----
[?25lsetup console
[H[Jfbv - The Framebuffer Viewer
/home/res/logo.png
140 x 140
[H[J[?25h------run rc.modules file-----
------run rc.final file-----
Load mpp modules
insmod: can't insert '/lib/modules/4.9.118/videobuf2-core.ko': No such file or directory
insmod: can't insert '/lib/modules/4.9.118/videobuf2-memops.ko': No such file or directory
insmod: can't insert '/lib/modules/4.9.118/videobuf2-v4l2.ko': No such file or directory
load /etc/asound.conf ...
alsactl: set_control:1461: Cannot write control '2:0:0:codec trigger playback time value:0' : Operation not permitted
alsactl: set_control:1461: Cannot write control '2:0:0:codec trigger capture time value:0' : Operation not permitted
Starting app...
enable android usb
Initializing random number generator... done.
Starting network...
generate key
WARNING: Logging before InitGoogleLogging() is written to STDERR
I0101 00:00:06.624842 803 dup2SeldomUsedFd.c:20] [60D[60C<dup2SeldomUsedFdInit> gFdLock init
Successfully initialized wpa_supplicant
udhcpc: started, v1.27.2
udhcpc: sending discover
I0101 00:00:07.530875 803 mpi_sys.c:766] [60D[60C<AW_MPI_SYS_SetConf> kfctmpdir is [/tmp]
I0101 00:00:07.532697 803 mpi_sys.c:1195] [60D[60C<AW_MPI_SYS_Init> ISP init
I0101 00:00:07.532854 803 mpi_sys.c:1197] [60D[60C<AW_MPI_SYS_Init> ISP init done
I0101 00:00:07.536176 803 hwdisplay.c:83] [60D[60C<hw_display_init> [1;34m<hw_display_init:83> [90D[90C[0m
I0101 00:00:07.536359 803 hwdisplay.c:989] [60D[60C<hwd_init> [1;34m<hwd_init:989> [90D[90C[0m(hwd_init 989)
I0101 00:00:07.536538 803 hwdisplay.c:1044] [60D[60C<hwd_init> [1;34m<hwd_init:1044> [90D[90C[0mret[0][2,0]ch[2]lyl[0] init: enable[1], screenwin[0,0, 240x240], zorder[16], alpha[mode:0, value:255]
I0101 00:00:07.536736 803 alsa_interface.c:659] [60D[60C<alsaOpenMixer> open mixer:hw:0
I0101 00:00:07.606276 803 alsa_interface.c:721] [60D[60C<alsaOpenMixer> set player pa switch level 0
I0101 00:00:07.606596 803 alsa_interface.c:709] [60D[60C<alsaOpenMixer> set playback vol_val to value: 27
E0101 00:00:07.744445 803 video_buffer_manager.c:211] [60D[60C<VideoBufMgrCreate> Alloc 20 input frame buffers in list manager.
E0101 00:00:07.745197 803 VideoVirVi_Component.c:481] [60D[60C<VideoViSetViDevAttr> fps 20 nbufs 3
E0101 00:00:07.796672 803 video_buffer_manager.c:211] [60D[60C<VideoBufMgrCreate> Alloc 20 input frame buffers in list manager.
E0101 00:00:07.797082 803 VideoVirVi_Component.c:481] [60D[60C<VideoViSetViDevAttr> fps 20 nbufs 3
I0101 00:00:07.804659 803 hwdisplay.c:1244] [60D[60C<hwd_get_disp_type> [1;32m<hwd_get_disp_type:1244> [90D[90C[0mCurrent the disp_type:0x1 tv_mode:0x0
I0101 00:00:07.804977 803 hwdisplay.c:1117] [60D[60C<hwd_layer_request_hlay> [1;34m<hwd_layer_request_hlay:1117> [90D[90C[0mhlay:0, zorder=0, cnt:2
I0101 00:00:07.805199 803 mpi_vo.c:1030] [60D[60C<AW_MPI_VO_SetVideoLayerAttr> ch[0]lyl[0]:dispRect changed, [0, 0, 320x240]->[0, 0, 240x240]
I0101 00:00:07.805321 803 hwdisplay.c:408] [60D[60C<hwd_layer_set_rect> [1;34m<hwd_layer_set_rect:408> [90D[90C[0mch[0]lyl[0]: screen_win[0,0, 240x240]
E0101 00:00:07.805822 803 vo.c:683] [60D[60C<vo_init> debuf create vo channel[0] success!
I0101 00:00:07.806197 889 Clock_Component.c:1109] [60D[60C<Clock_ComponentThread> ClockComp state[0x1]->Idle!
E0101 00:00:07.806368 803 vo.c:718] [60D[60C<vo_init> debuf create clock channel[0] success!
I0101 00:00:07.806529 889 cedarx_avs_counter.c:148] [60D[60C<avscounter_start> (f:avscounter_start, l:148) Avscounter status [pause]->[run], pauseDuration[0][0]ms
I0101 00:00:07.806711 803 hwdisplay.c:1117] [60D[60C<hwd_layer_request_hlay> [1;34m<hwd_layer_request_hlay:1117> [90D[90C[0mhlay:9, zorder=9, cnt:3
I0101 00:00:07.806860 803 mpi_vo.c:1030] [60D[60C<AW_MPI_VO_SetVideoLayerAttr> ch[2]lyl[1]:dispRect changed, [0, 0, 320x240]->[0, 0, 240x240]
I0101 00:00:07.806959 803 hwdisplay.c:408] [60D[60C<hwd_layer_set_rect> [1;34m<hwd_layer_set_rect:408> [90D[90C[0mch[2]lyl[1]: screen_win[0,0, 240x240]
I0101 00:00:07.807058 803 mpi_vo.c:1130] [60D[60C<AW_MPI_VO_SetVideoLayerAlpha> video layer alpha changed, [0, 128]->[0, 25]
E0101 00:00:07.808746 803 vo.c:454] [60D[60C<CreateVoUiLayer> create vo channel[0] success!
udhcpc: sending discover
〜中略〜
I0101 00:00:16.854119 890 mpi_vo.c:508] [60D[60C<VideoRenderEventHandler> KeyFrameDecoded, pts[0]us
E0101 00:00:16.854372 890 vo.c:286] [60D[60C<VoUiCallbackWrapper> debuf vo report rendering start
done
BusyBox v1.27.2 () built-in shell (ash)
------run profile file-----
_ .-') ('-. ) (`-.
( '.( OO )_ ( OO ).-. ( OO ).
,--. ,--.) / . --. / ,-.-')(_/. \_)-.
| `.' | | \-. \ | |OO)\ `.' /
| |.-'-' | | | | \ \ /\
| |'.'| | \| |_.' | | |(_/ \ \ |
| | | | | .-. | ,| |_.' .' \_)
| | | | | | | |(_| | / .'. \
`--' `--' `--' `--' `--' '--' '--'
__ _
/ / (_)__ __ ____ __ ------------------------
/ /__/ / _ \/ // /\ \ / sipeed.com (Neptune)
/____/_/_//_/\_,_//_\_\ ------------------------
root@sipeed:/# PaUnixThread_New: Waited for 0.00035175 seconds for stream to start
〜後略〜うんLinuxだね。

エッジAI?
どう使うかちょっと調べて遊んでみよう。
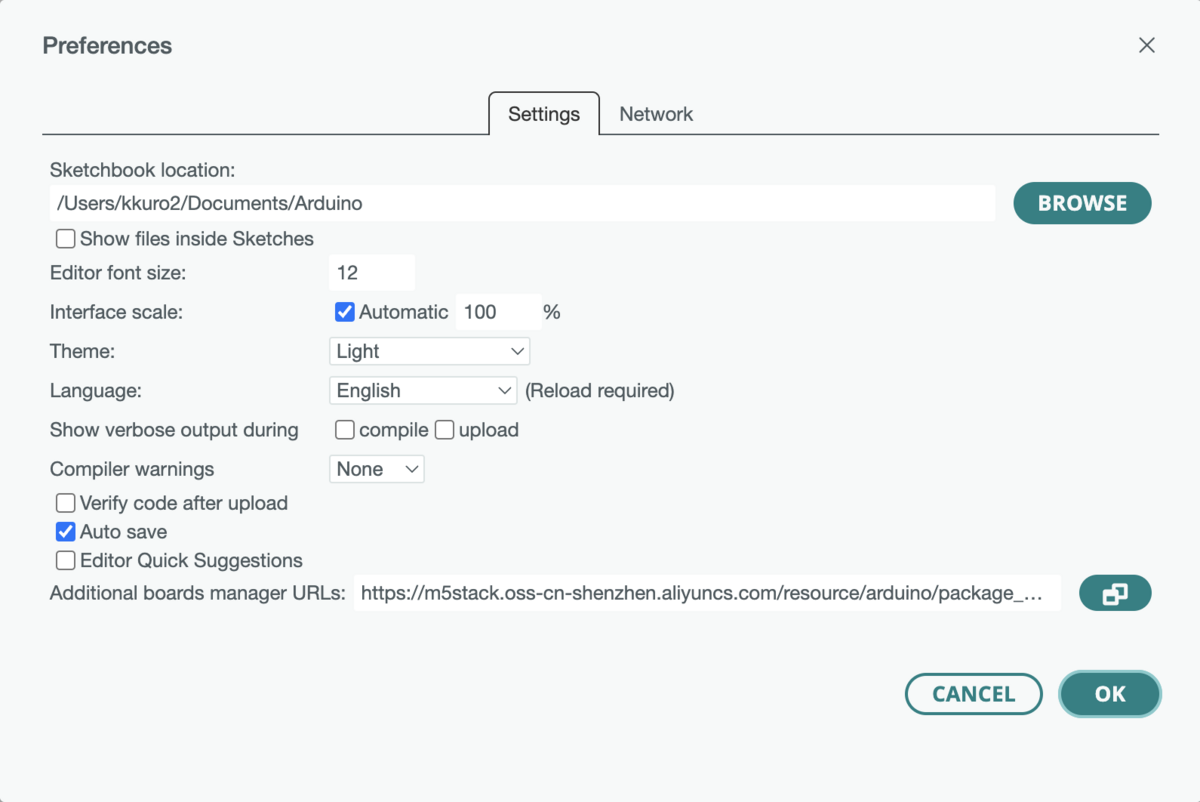
ちなみに在庫2個だったんで2個とも確保。いま見てみたら普通は9600円で売っているらしい。9を入力し損ねたんかも。